H A L®が与えてくれた自信
「ここまで出来るようになったんだよ!!」そう言ってS様は車椅子から立ち上がって見せてくれました。もちろんレジカウンターに手を付いてはいますが、完全に自分の脚に体重をかけて立つことが出来ています。
「でもね、まだ左の膝が膝折れしちゃうんだよ。これがコントロールできるようになったら歩けるようになるだろ。何としても歩けるようになりたいからね」
明るい顔でS様はそう話されました。
「でもね、まだ左の膝が膝折れしちゃうんだよ。これがコントロールできるようになったら歩けるようになるだろ。何としても歩けるようになりたいからね」
明るい顔でS様はそう話されました。

◆初回カウンセリング資料より
2019年8月事故により第11胸椎骨折、第1・3腰椎脱臼骨折、脊椎後方固定術、除圧術施行、後遺症として両下肢対麻痺が残る。
回復期リハビリ後、在宅復帰、週1回通院によるリハビリ継続し、ストレッチ、長下肢装具による立位保持・歩行訓練などを行ってきた。
回復期リハビリ後、在宅復帰、週1回通院によるリハビリ継続し、ストレッチ、長下肢装具による立位保持・歩行訓練などを行ってきた。
動きも少しずつだが戻ってきており、4ヶ月前に右脚がわずかに動くようになってきたと感じていたが、同時に、より一層自立度の向上を目指すには、保険内のリハビリサービスの利用だけでは足りないのではと考え、様々なリハビリサービスを探す中で「つくばロボケアセンター」に行き当たり、体験を申し込まれる。
車椅子への移乗は、腕のよるプッシュアップにて自立だが、立位は不可。
右脚はわずかだが足関節と膝関節に随意運動あり。
右脚はわずかだが足関節と膝関節に随意運動あり。
本人のご希望 立ち座りを自分で出来るようになり、脚の力で立てるようになりたい。
出来れば歩く訓練をして、杖歩行でも良いから歩けるようになりたい。
出来れば歩く訓練をして、杖歩行でも良いから歩けるようになりたい。
◆2020年4月 Neuro HALFIT®プログラム開始
【初回体験】
HAL®腰タイプにて体幹動作の確認。体幹前後傾動作では生体電位信号が確認でき、HAL ®のアシストを受けてプログラムを実施。
HAL ®自立支援用下肢タイプを装着したところ、両下肢ともに生体電位信号は微弱であり、特に左下肢への荷重が困難なため、生体電位信号に基づいてアシストするサイバニック随意制御(C V C)モードではなく、あらかじめプログラミングされた脚の軌道に合わせてアシストするサイバニック自立制御(C A C)モードにて歩行プログラムを実施する。
HAL®腰タイプにて体幹動作の確認。体幹前後傾動作では生体電位信号が確認でき、HAL ®のアシストを受けてプログラムを実施。
HAL ®自立支援用下肢タイプを装着したところ、両下肢ともに生体電位信号は微弱であり、特に左下肢への荷重が困難なため、生体電位信号に基づいてアシストするサイバニック随意制御(C V C)モードではなく、あらかじめプログラミングされた脚の軌道に合わせてアシストするサイバニック自立制御(C A C)モードにて歩行プログラムを実施する。
初回プログラムでは、後遺症により下肢の生体電位信号がごく微弱であり、随意的な歩行プログラムを実施するには不十分でした。そこで、HAL ®単関節タイプを使って膝・足首のプログラムを実施し、下肢の神経伝達の賦活を行うことをプログラムのメインとし、歩行プログラムはC A Cモードによる荷重への意識づけ、歩行動作における立脚期・遊脚期のイメージ作りを継続して行うことになりました。
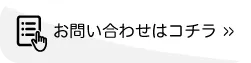
【HAL ®単関節プログラム】
HAL ®単関節タイプのプログラムでは、特に左の足関節と膝関節の動作をどのように引き出していくかという点を工夫しました。まず、当初は左脚の生体電位信号がほとんど検出されない状況だったので、まずは微弱ではありましたが、生体電位信号が検出できる右脚から実施していきました。
随意運動がみられていた右脚についてはプログラム開始から信号量の増加が見られていたため、プログラムを実施して間もなくH A L ®を装着しない状態でも随意運動がみられるように変化していきました。
一方、生体電位信号がほとんど検出されていなかった左脚については、右脚に貼った電極から生体電位信号を取り、左脚に装着したH A L ®を動かすという工夫をしてみました。継続して行っていくうちに、徐々に左脚でも神経伝達が賦活され、しばらくすると左脚からも生体電位信号が検出できるようになり、ついに左脚も同側から検出した生体電位信号に基づくプログラムが実施できるようになりました。
HAL ®単関節タイプとご自宅での自主プログラム実施の結果、S様はまず右脚でアクセル、ブレーキを踏むということができるようになったため、車の運転が可能となり、行動範囲がとても広がったとの事です。
また、全く動かせなかった左脚も少しずつ随意運動が可能となり、膝に力を入れる感覚や足首を曲げる感覚など試行錯誤しながら掴むことができ、今では膝を伸ばして持続的に力を入れることも出来るようになってきています。
随意運動がみられていた右脚についてはプログラム開始から信号量の増加が見られていたため、プログラムを実施して間もなくH A L ®を装着しない状態でも随意運動がみられるように変化していきました。
一方、生体電位信号がほとんど検出されていなかった左脚については、右脚に貼った電極から生体電位信号を取り、左脚に装着したH A L ®を動かすという工夫をしてみました。継続して行っていくうちに、徐々に左脚でも神経伝達が賦活され、しばらくすると左脚からも生体電位信号が検出できるようになり、ついに左脚も同側から検出した生体電位信号に基づくプログラムが実施できるようになりました。
HAL ®単関節タイプとご自宅での自主プログラム実施の結果、S様はまず右脚でアクセル、ブレーキを踏むということができるようになったため、車の運転が可能となり、行動範囲がとても広がったとの事です。
また、全く動かせなかった左脚も少しずつ随意運動が可能となり、膝に力を入れる感覚や足首を曲げる感覚など試行錯誤しながら掴むことができ、今では膝を伸ばして持続的に力を入れることも出来るようになってきています。
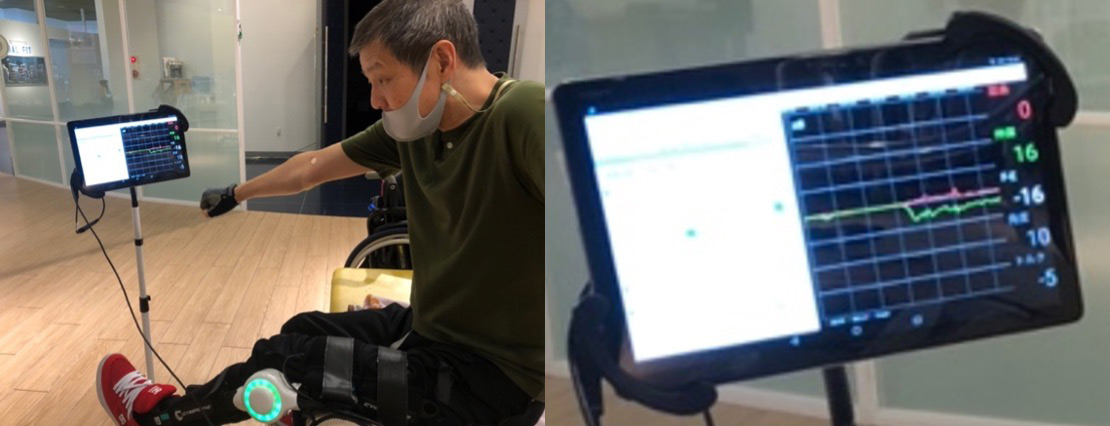
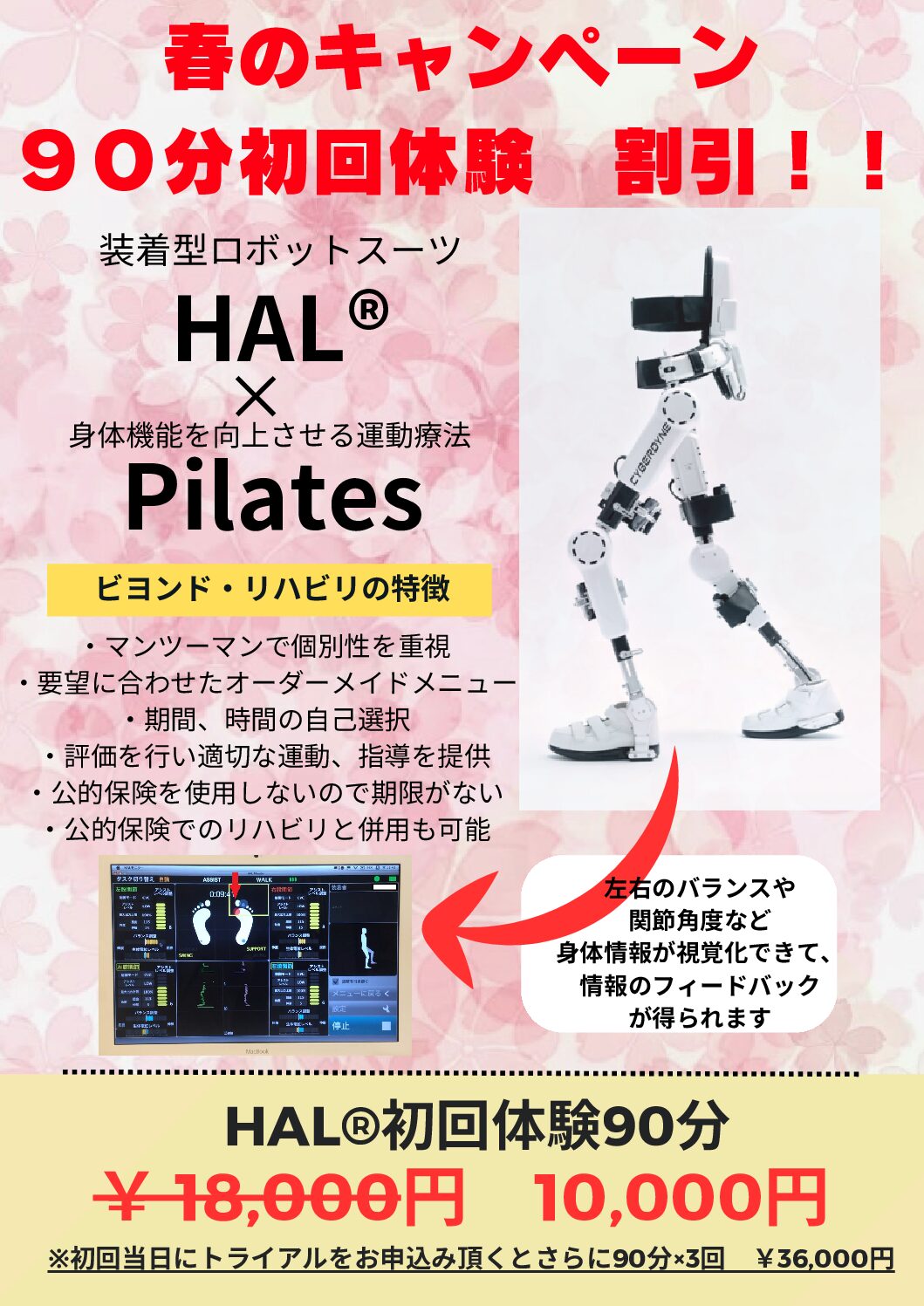
H A L ®単関節タイプのプログラム 左膝の伸展の生体電位信号が持続的に検出されていることがデータロガー(HAL®︎単関節タイプ専用モニター)を通して確認できます。
【HAL ®下肢タイプによる歩行プログラム】
HAL ®単関節タイプのプログラムにより生体電位信号の検出が可能となったことで、HAL ®自立支援用下肢タイプによる歩行プログラムの内容にも変化が見られて来ました。
当初は、サイバニック自立制御(C A C)モードにて歩行プログラムを実施していましたが、左脚からの生体電位信号の検出が可能となったため、生体電位信号に基づいてアシストするサイバニック随意制御(C V C)モードでのプログラムが可能となったのです。簡単に言うと、ご自分の動作意思に基づくアシストを受けながらプログラムが実施できるようになったのです。
歩行と、立ち座りやスクワットなどのプログラムをHAL®︎装着下で合わせて実施し、より下肢の随意運動を賦活していった結果、HAL ®を外した状態でも立ち座りが出来るようになりました。
自分の脚で自分の身体を支えて立つ、ということを遂に達成されました。
現在は自立歩行の実現に向けて更にプログラムを継続実施されています。
当初は、サイバニック自立制御(C A C)モードにて歩行プログラムを実施していましたが、左脚からの生体電位信号の検出が可能となったため、生体電位信号に基づいてアシストするサイバニック随意制御(C V C)モードでのプログラムが可能となったのです。簡単に言うと、ご自分の動作意思に基づくアシストを受けながらプログラムが実施できるようになったのです。
歩行と、立ち座りやスクワットなどのプログラムをHAL®︎装着下で合わせて実施し、より下肢の随意運動を賦活していった結果、HAL ®を外した状態でも立ち座りが出来るようになりました。
自分の脚で自分の身体を支えて立つ、ということを遂に達成されました。
現在は自立歩行の実現に向けて更にプログラムを継続実施されています。
まずはお気軽にお問い合わせください
ロボケアセンターでは、初回体験キャンペーンなど様々な特典もご用意しています。ご興味を持っていただいた患者さんやリハビリの介護をされているご家族は、遠慮なく下記の問い合わせフォームからお問い合わせください。専門スタッフが状況をお聞かせいただき、最適なプランや拠点をご案内致します。